制御盤製作実習 完成(基本編)
みなさん、元気にやってはりますかぁ~?!
我輩も元気にやっとります!
どうもご無沙汰して、スイマセン!
制御盤製作実習も難しいし、
訓練終了後のことも準備せなイカンし、
花粉は飛んでるし、
花見は行かなアカンし、
自転車のパンク修理はせなイカンし・・・、
(笑)
さて、FAソリューション技術科11月生の
制御盤製作実習もようやく終わりに近づいてきました。
先生方は基本、我輩たち訓練生を放置で、
「お前ら、そろそろ一人前にならんと、社会に出てから苦労するぞ。
自分らでやってみろ。どうしても分からんかったら、聞きに来い。」
といったスタンスです(と我輩には見える)。
食らいついて行く奴は伸びます。
我輩、最近、至る所で、
職業:エンジニア
と自称しておりますので、
何としても、得られるものはトコトン得たいです。
↓これが我が班の制御盤です。

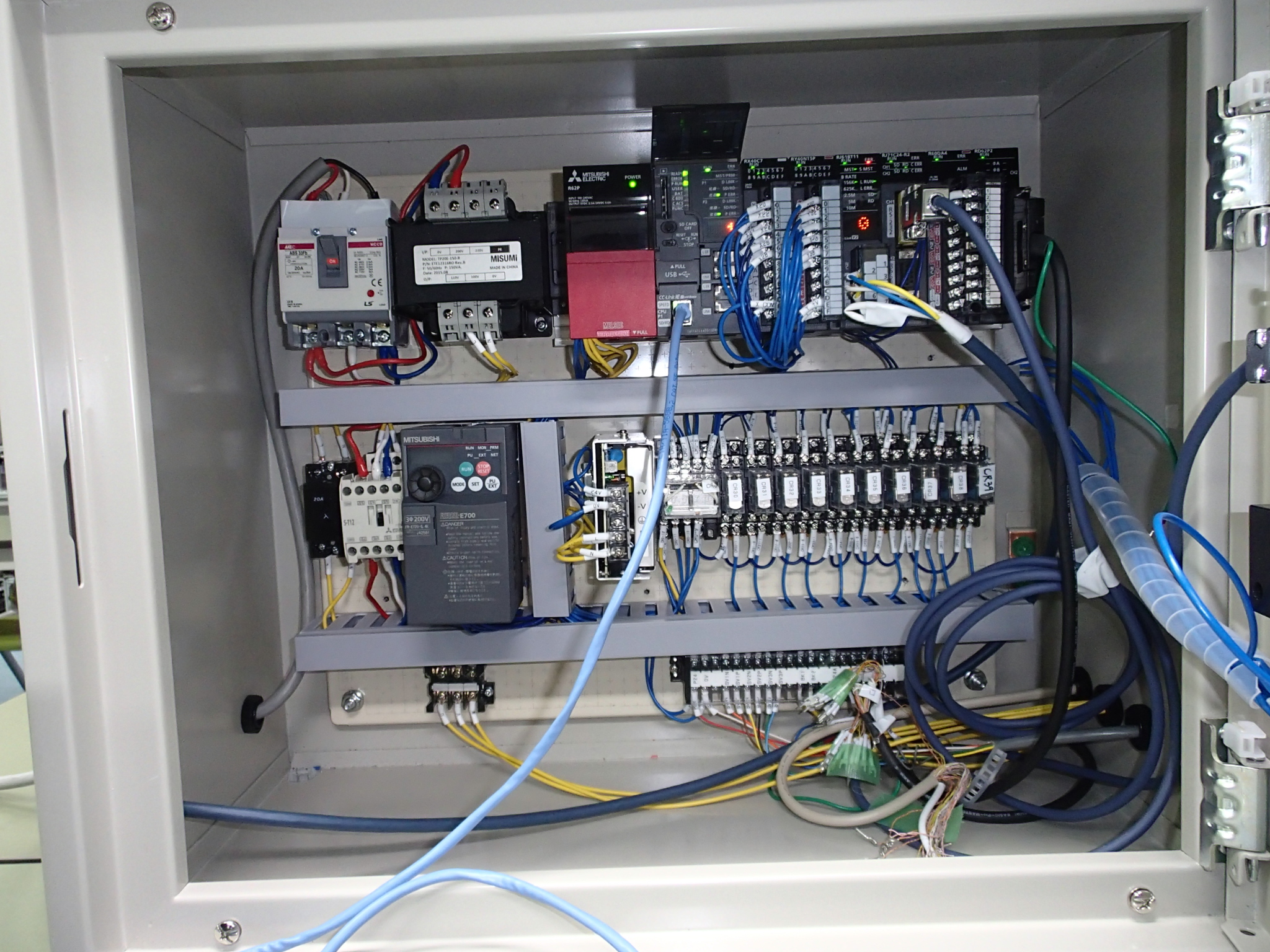
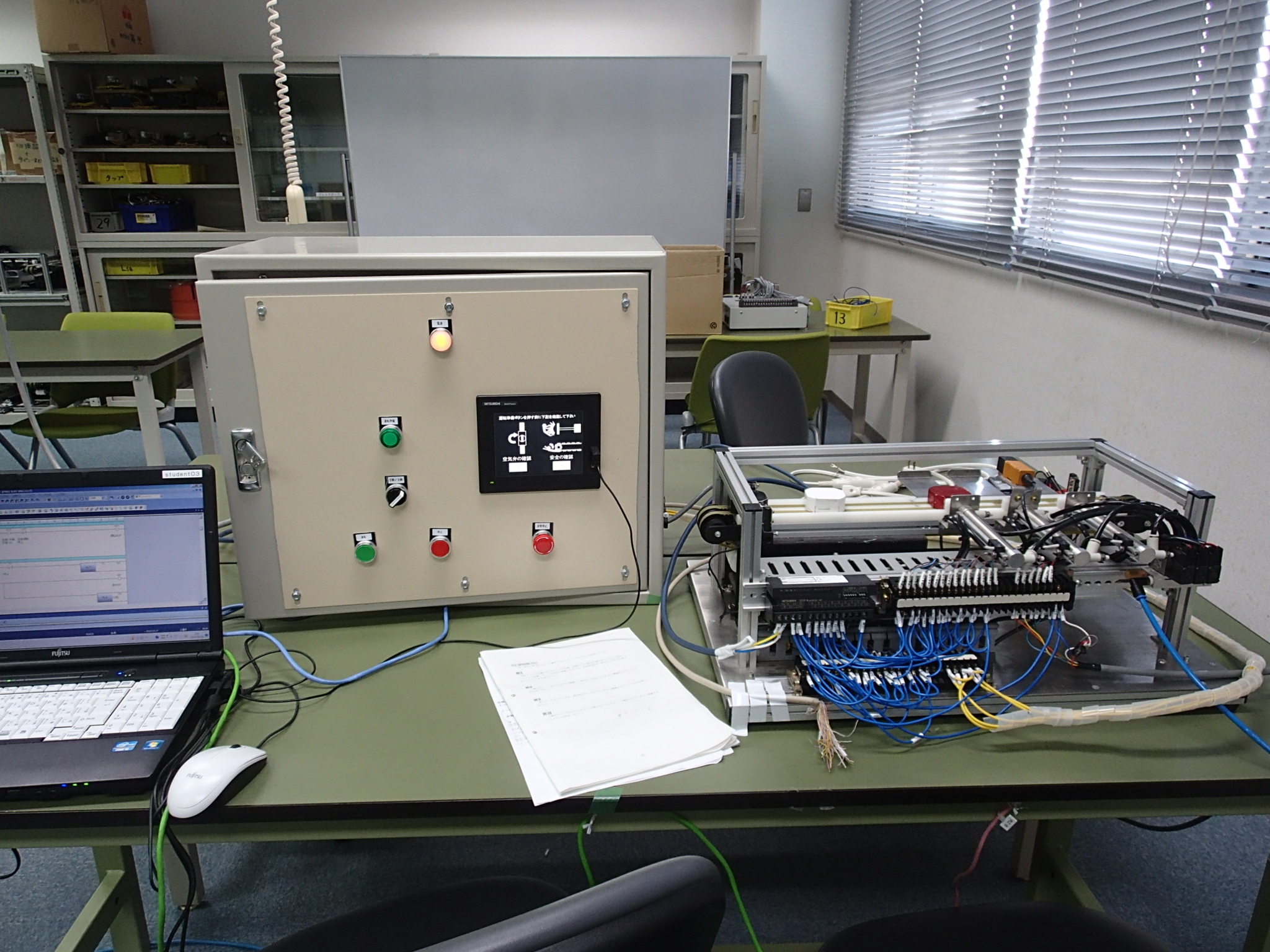
ただし、まだ基本編です。
この後、
近接センサを使うのではなく、
ステップモーターの動きを高速カウンタで読み取り、
D/A変換ユニットでステップモータを制御するシステムを
組み込んで行きます。
一流エンジニアへの道は、
まだまだ続く・・・。
では、また。
みなさんにもイイ事がイッパイありますように!
\(^∇^)/シャ~ッ(祈)!♪
(祈りの力は実はスゴイ!)
ブログ村に参加しました。
↓ポチッと押していただければ、嬉しいです!
ありがとうございます!